Gesture Controlled Pick & Place Robot
Undergraduate Final Year Project (At American International University-Bangladesh, December 2017)
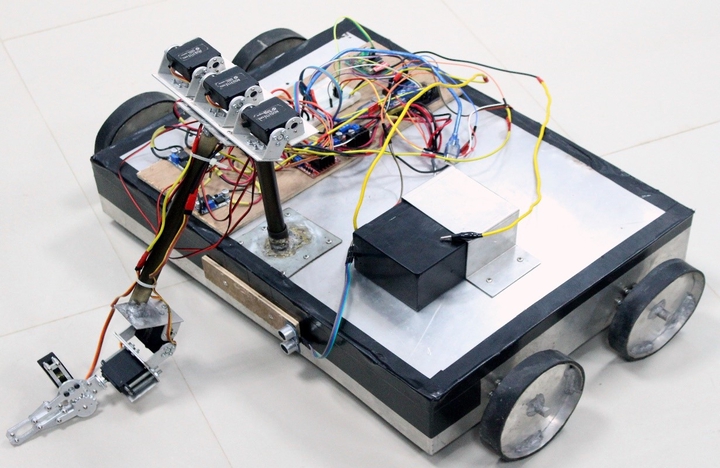
In this project, a gesture-controlled pick-and-place robot was proposed with a drive system. This design is wirelessly controllable using a hand module. The main purpose was to aid physically disabled people to manipulate an object as they wish. Moreover, it will be useful in industrial work as it has the option of mobility, a trait that conventional pick-and-place robots do not have.