Demonstration of Medical Robotics in Spine Surgery using Tx60 Staubli Robot
Project for ‘Computer Aided Surgery and Medical Robotics’ course ( Master’s Third Semester at University of Girona, January 2020)
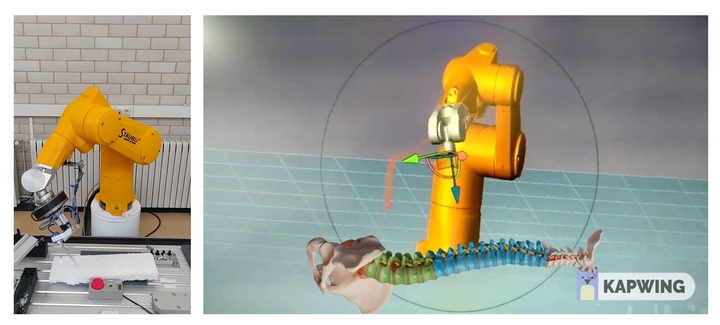
The goal of this project was to demonstrate pedicle screw placement for spine fusion. Steps - 1) Trajectory planning (Type of movement is Point to point), 2) Software simulation of robotic spine surgery (Stäubli Robotics Suite), and 3) Testing demo surgery using Tx60 Stabuli.